The Sturm–Liouville problems are eigenvalue problems of the form:
on the interval The solutions are then the eigenvalues ![]() and the eigenfunctions
and the eigenfunctions ![]() . The eigenfunctions are
orthogonal with respect to the measure
. The eigenfunctions are
orthogonal with respect to the measure ![]() :
:
Singular Sturm–Liouville problems are particularly important for spectral methods. A Sturm–Liouville
problem is singular if and only if the function ![]() vanishes at the boundaries
vanishes at the boundaries ![]() . One can show, that
if the functions of the spectral basis are chosen to be the solutions of a singular Sturm–Liouville problem,
then the convergence of the function to its interpolant is faster than any power law of
. One can show, that
if the functions of the spectral basis are chosen to be the solutions of a singular Sturm–Liouville problem,
then the convergence of the function to its interpolant is faster than any power law of ![]() ,
, ![]() being the
order of the expansion (see Section 5.2 of [57
being the
order of the expansion (see Section 5.2 of [57![]() ]). One talks about spectral convergence. Let us
be precise in saying that this does not necessarily imply that the convergence is exponential.
Convergence properties are discussed in more detail for Legendre and Chebyshev polynomials in
Section 2.4.4.
]). One talks about spectral convergence. Let us
be precise in saying that this does not necessarily imply that the convergence is exponential.
Convergence properties are discussed in more detail for Legendre and Chebyshev polynomials in
Section 2.4.4.
Conversely, it can be shown that spectral convergence is not ensured when considering solutions of
regular Sturm–Liouville problems [57![]() ].
].
In what follows, two usual types of solutions of singular Sturm–Liouville problems are considered: Legendre and Chebyshev polynomials.
Legendre polynomials ![]() are eigenfunctions of the following singular Sturm–Liouville problem:
are eigenfunctions of the following singular Sturm–Liouville problem:
It follows that Legendre polynomials are orthogonal on ![]() with respect to the measure
with respect to the measure
![]() . Moreover, the scalar product of two polynomials is given by:
. Moreover, the scalar product of two polynomials is given by:
Starting from ![]() and
and ![]() , the successive polynomials can be computed by the following
recurrence expression:
, the successive polynomials can be computed by the following
recurrence expression:
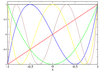
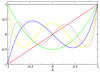
Among the various properties of Legendre polynomials, one can note that i) ![]() has the same parity as
has the same parity as
![]() . ii)
. ii) ![]() is of degree
is of degree ![]() . iii)
. iii) ![]() . iv)
. iv) ![]() has exactly
has exactly ![]() zeros on
zeros on ![]() . The first
polynomials are shown in Figure 8
. The first
polynomials are shown in Figure 8![]() .
.
The weights and locations of the collocation points associated with Legendre polynomials depend on the choice of quadrature.
These values have no analytic expression, but they can be computed numerically in an efficient way.
Some elementary operations can easily be performed on the coefficient space. Let us assume that a
function ![]() is given by its coefficients
is given by its coefficients ![]() so that
so that  . Then, the coefficients
. Then, the coefficients
![]() of
of  can be found as a function of
can be found as a function of ![]() , for various operators
, for various operators ![]() . For
instance,
. For
instance,
These kind of relations enable one to represent the action of ![]() as a matrix acting on the vector of
as a matrix acting on the vector of
![]() , the product being the coefficients of
, the product being the coefficients of ![]() , i.e. the
, i.e. the ![]() .
.
Chebyshev polynomials ![]() are eigenfunctions of the following singular Sturm–Liouville problem:
are eigenfunctions of the following singular Sturm–Liouville problem:
It follows that Chebyshev polynomials are orthogonal on ![]() with respect to the measure
with respect to the measure
![]() and the scalar product of two polynomials is
and the scalar product of two polynomials is
Contrary to the Legendre case, both the weights and positions of the collocation points are given by analytic formulae:
As for the Legendre case, the action of various linear operators ![]() can be expressed in the coefficient
space. This means that the coefficients
can be expressed in the coefficient
space. This means that the coefficients ![]() of
of ![]() are given as functions of the coefficients
are given as functions of the coefficients ![]() of
of ![]() .
For instance,
.
For instance,
One of the main advantages of spectral methods is the very fast convergence of the interpolant ![]() to
the function
to
the function ![]() , at least for smooth enough functions. Let us consider a
, at least for smooth enough functions. Let us consider a ![]() function
function ![]() ;
one can place the following upper bounds on the difference between
;
one can place the following upper bounds on the difference between ![]() and its interpolant
and its interpolant
![]() :
:
The ![]() are positive constants. An interesting limit of the above estimates concerns a
are positive constants. An interesting limit of the above estimates concerns a ![]() function.
One can then see that the difference between
function.
One can then see that the difference between ![]() and
and ![]() decays faster than any power of
decays faster than any power of ![]() . This is
spectral convergence. Let us be precise in saying that this does not necessarily imply that the error
decays exponentially (think about
. This is
spectral convergence. Let us be precise in saying that this does not necessarily imply that the error
decays exponentially (think about ![]() , for instance). Exponential convergence is
achieved only for analytic functions, i.e. functions that are locally given by a convergent power
series.
, for instance). Exponential convergence is
achieved only for analytic functions, i.e. functions that are locally given by a convergent power
series.
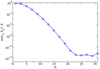
An example of this very fast convergence is shown in Figure 10![]() . The error clearly decays
exponentially, the function being analytic, until it reaches the level of machine precision, 10–14
(one is working in double precision in this particular case). Figure 10
. The error clearly decays
exponentially, the function being analytic, until it reaches the level of machine precision, 10–14
(one is working in double precision in this particular case). Figure 10![]() illustrates the fact that,
with spectral methods, very good accuracy can be reached with only a moderate number of
coefficients.
illustrates the fact that,
with spectral methods, very good accuracy can be reached with only a moderate number of
coefficients.
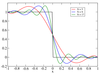
If the function is less regular (i.e. not ![]() ), the error only decays as a power law, thus making the use
of spectral method less appealing. It can easily be seen in the worst possible case: that of a discontinuous
function. In this case, the estimates (50
), the error only decays as a power law, thus making the use
of spectral method less appealing. It can easily be seen in the worst possible case: that of a discontinuous
function. In this case, the estimates (50![]() -52
-52![]() ) do not even ensure convergence. Figure 11
) do not even ensure convergence. Figure 11![]() shows a step
function and its interpolant for various values of
shows a step
function and its interpolant for various values of ![]() . One can see that the maximum difference between
the function and its interpolant does not go to zero even when
. One can see that the maximum difference between
the function and its interpolant does not go to zero even when ![]() is increasing. This is known as the
Gibbs phenomenon.
is increasing. This is known as the
Gibbs phenomenon.
Finally, Equation (52![]() ) shows that, if
) shows that, if ![]() , the interpolant converges uniformly to the function.
Continuous functions that do not converge uniformly to their interpolant, whose existence has
been shown by Faber [73] (see Section 2.2), must belong to the
, the interpolant converges uniformly to the function.
Continuous functions that do not converge uniformly to their interpolant, whose existence has
been shown by Faber [73] (see Section 2.2), must belong to the ![]() functions. Indeed, for
the case
functions. Indeed, for
the case ![]() , Equation (52
, Equation (52![]() ) does not prove convergence (neither do Equations (50
) does not prove convergence (neither do Equations (50![]() ) or
(51
) or
(51![]() )).
)).
A detailed presentation of the theory of Fourier transforms is beyond the scope of this work. However, there
is a close link between discrete Fourier transforms and their spectral interpolation, which is briefly outlined
here. More detail can be found, for instance, in [57![]() ].
].
The Fourier transform ![]() of a function
of a function ![]() of
of ![]() is given by:
is given by:
The solution to this problem is also very similar to the use of the Gaussian quadratures. Let us
introduce ![]() collocation points
collocation points ![]() . Then the discrete Fourier coefficients with
respect to those points are:
. Then the discrete Fourier coefficients with
respect to those points are:
The approximation made by using discrete coefficients in place of real ones is of the same nature as the
one made when computing coefficients of projection (30![]() ) by means of the Gaussian quadratures.
Let us mention that, in the case of a discrete Fourier transform, the first and last collocation
points lie on the boundaries of the interval, as for a Gauss-Lobatto quadrature. As for the
polynomial interpolation, the convergence of
) by means of the Gaussian quadratures.
Let us mention that, in the case of a discrete Fourier transform, the first and last collocation
points lie on the boundaries of the interval, as for a Gauss-Lobatto quadrature. As for the
polynomial interpolation, the convergence of ![]() to
to ![]() is spectral for all periodic and
is spectral for all periodic and ![]() functions.
functions.
For periodic functions of ![]() , the discrete Fourier transform is the natural choice of basis. If
the considered function has also some symmetries, one can use a subset of the trigonometric
polynomials. For instance, if the function is i) periodic on
, the discrete Fourier transform is the natural choice of basis. If
the considered function has also some symmetries, one can use a subset of the trigonometric
polynomials. For instance, if the function is i) periodic on ![]() and is also odd with respect to
and is also odd with respect to
![]() , then it can be expanded in terms of sines only. If the function is not periodic, then it is
natural to expand it either in Chebyshev or Legendre polynomials. Using Legendre polynomials
can be motivated by the fact that the associated measure is very simple:
, then it can be expanded in terms of sines only. If the function is not periodic, then it is
natural to expand it either in Chebyshev or Legendre polynomials. Using Legendre polynomials
can be motivated by the fact that the associated measure is very simple: ![]() . The
multidomain technique presented in Section 2.6.5 is one particular example in which such a
property is required. In practice, Legendre and Chebyshev polynomials usually give very similar
results.
. The
multidomain technique presented in Section 2.6.5 is one particular example in which such a
property is required. In practice, Legendre and Chebyshev polynomials usually give very similar
results.
| http://www.livingreviews.org/lrr-2009-1 | This work is licensed under a Creative Commons License. Problems/comments to |

![∑N bn = (n + 1∕2 ) [p(p + 1) − n(n + 1)]ap. (43) p=n+2,p+neven](article323x.gif)