Let us consider a differential equation of the form
where As for the elementary operations presented in Section 2.4.2 and 2.4.3, the action of ![]() on
on ![]() can be
expressed by a matrix
can be
expressed by a matrix ![]() . If the coefficients of
. If the coefficients of ![]() with respect to a given basis are the
with respect to a given basis are the ![]() , then the
coefficients of
, then the
coefficients of ![]() are
are
A function ![]() is an admissible solution to the problem if and only if i) it fulfills the boundary
conditions exactly (up to machine accuracy) ii) it makes the residual
is an admissible solution to the problem if and only if i) it fulfills the boundary
conditions exactly (up to machine accuracy) ii) it makes the residual ![]() small. In the weighted
residual method, one considers a set of
small. In the weighted
residual method, one considers a set of ![]() test functions
test functions ![]() on
on ![]() . The smallness of
. The smallness of
![]() is enforced by demanding that
is enforced by demanding that
In this particular method, the test functions coincide with the basis used for the spectral expansion, for
instance the Chebyshev polynomials. Let us denote ![]() and
and ![]() the coefficients of the solution
the coefficients of the solution ![]() and of
the source
and of
the source ![]() , respectively.
, respectively.
Given the expression of ![]() in the coefficient space (59
in the coefficient space (59![]() ) and the fact that the basis polynomials are
orthogonal, the residual equations (60
) and the fact that the basis polynomials are
orthogonal, the residual equations (60![]() ) are expressed as
) are expressed as
The tau method thus ensures that ![]() and
and ![]() have the same coefficients, excepting the last ones. If
the functions are smooth, then their coefficients should decrease in a spectral manner and so the “forgotten”
conditions are less and less stringent as
have the same coefficients, excepting the last ones. If
the functions are smooth, then their coefficients should decrease in a spectral manner and so the “forgotten”
conditions are less and less stringent as ![]() increases, ensuring that the computed solution converges
rapidly to the real one.
increases, ensuring that the computed solution converges
rapidly to the real one.
As an illustration, let us consider the following equation:
with the following boundary conditions: The exact solution is analytic and is given by Figure 12![]() shows the exact solution and the numerical one, for two different values of
shows the exact solution and the numerical one, for two different values of ![]() . One can note
that the numerical solution converges rapidly to the exact one, the two being almost indistinguishable for
. One can note
that the numerical solution converges rapidly to the exact one, the two being almost indistinguishable for
![]() as small as
as small as ![]() . The numerical solution exactly fulfills the boundary conditions, no matter the
value of
. The numerical solution exactly fulfills the boundary conditions, no matter the
value of ![]() .
.
The collocation method is very similar to the tau method. They only differ in the choice of test functions.
Indeed, in the collocation method one uses continuous functions that are zero at all but one
collocation point. They are indeed the Lagrange cardinal polynomials already seen in Section 2.2
and can be written as ![]() . With such test functions, the residual equations (60
. With such test functions, the residual equations (60![]() ) are
) are
The value of ![]() at each collocation point is easily expressed in terms of
at each collocation point is easily expressed in terms of ![]() by making use of (59
by making use of (59![]() )
and one gets
)
and one gets
Let us note that, even if the collocation method imposes that ![]() and
and ![]() coincide at each collocation
point, the unknowns of the system written in the form (66
coincide at each collocation
point, the unknowns of the system written in the form (66![]() ) are the coefficients
) are the coefficients ![]() and not
and not ![]() . As
for the tau method, system (66
. As
for the tau method, system (66![]() ) is not invertible and boundary conditions must be enforced by additional
equations. In this case, the relaxed conditions are the two associated with the outermost points,
i.e.
) is not invertible and boundary conditions must be enforced by additional
equations. In this case, the relaxed conditions are the two associated with the outermost points,
i.e. ![]() and
and ![]() , which are replaced by appropriate boundary conditions to get an invertible
system.
, which are replaced by appropriate boundary conditions to get an invertible
system.
Figure 13![]() shows both the exact and numerical solutions for Equation (62
shows both the exact and numerical solutions for Equation (62![]() ).
).
The basic idea of the Galerkin method is to seek the solution ![]() as a sum of polynomials
as a sum of polynomials ![]() that
individually verify the boundary conditions. Doing so,
that
individually verify the boundary conditions. Doing so, ![]() automatically fulfills those conditions and they
do not have to be imposed by additional equations. Such polynomials constitute a Galerkin basis of the
problem. For practical reasons, it is better to choose a Galerkin basis that can easily be expressed in terms
of the original orthogonal polynomials.
automatically fulfills those conditions and they
do not have to be imposed by additional equations. Such polynomials constitute a Galerkin basis of the
problem. For practical reasons, it is better to choose a Galerkin basis that can easily be expressed in terms
of the original orthogonal polynomials.
For instance, with boundary conditions (63![]() ), one can choose:
), one can choose:
More generally, the Galerkin basis relates to the usual ones by means of a transformation matrix
Let us mention that the matrix The solution ![]() is sought in terms of the coefficients
is sought in terms of the coefficients ![]() on the Galerkin basis:
on the Galerkin basis:
The test functions used in the Galerkin method are the ![]() themselves, so that the residual system
reads:
themselves, so that the residual system
reads:
The solution obtained by the application of this method to Equation (62![]() ) is shown in Figure 14
) is shown in Figure 14![]() .
.
A spectral method is said to be optimal if it does not introduce an additional error to the error that would be introduced by interpolating the exact solution of a given equation.
Let us call ![]() such an exact solution, unknown in general. Its interpolant is
such an exact solution, unknown in general. Its interpolant is ![]() and
the numerical solution of the equation is
and
the numerical solution of the equation is ![]() . The numerical method is then optimal if
and only if
. The numerical method is then optimal if
and only if ![]() and
and ![]() behave in the same manner when
behave in the same manner when
![]() .
.
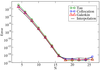
In general, optimality is difficult to check because both ![]() and its interpolant are unknown.
However, for the test problem proposed in Section 2.5.2 this can be done. Figure 15
and its interpolant are unknown.
However, for the test problem proposed in Section 2.5.2 this can be done. Figure 15![]() shows the maximum
relative difference between the exact solution (64
shows the maximum
relative difference between the exact solution (64![]() ) and its interpolant and the various numerical solutions.
All the curves behave in the same manner as
) and its interpolant and the various numerical solutions.
All the curves behave in the same manner as ![]() increases, indicating that the three methods previously
presented are optimal (at least for this particular case).
increases, indicating that the three methods previously
presented are optimal (at least for this particular case).
| http://www.livingreviews.org/lrr-2009-1 | This work is licensed under a Creative Commons License. Problems/comments to |







