As seen in Section 2.4.4, spectral methods are very efficient when dealing with ![]() functions. However,
they lose some of their appeal when dealing with less regular functions, the convergence to the exact
functions being substantially slower. Nevertheless, the physicist has sometimes to deal with such functions.
This is the case for the density jump at the surface of strange stars or the formation of shocks, to mention
only two examples. In order to maintain spectral convergence, one then needs to introduce
several computational domains such that the various discontinuities of the functions lie at the
interface between the domains. Doing so in each domain means that one only deals with
functions. However,
they lose some of their appeal when dealing with less regular functions, the convergence to the exact
functions being substantially slower. Nevertheless, the physicist has sometimes to deal with such functions.
This is the case for the density jump at the surface of strange stars or the formation of shocks, to mention
only two examples. In order to maintain spectral convergence, one then needs to introduce
several computational domains such that the various discontinuities of the functions lie at the
interface between the domains. Doing so in each domain means that one only deals with ![]() functions.
functions.
Multidomain techniques can also be valuable when dealing with a physical space either too complicated or too large to be described by a single domain. Related to that, one can also use several domains to increase the resolution in some parts of the space where more precision is required. This can easily be done by using a different number of basis functions in different domains. One then talks about fixed-mesh refinement.
Efficient parallel processing may also require that several domains be used. Indeed, one could set a solver, dealing with each domain on a given processor, and interprocessor communication would then only be used for matching the solution across the various domains. The algorithm of Section 2.6.4 is well adapted to such purposes.
In the following, four different multidomain methods are presented to solve an equation
of the type ![]() on
on ![]() .
. ![]() is a second-order linear operator and
is a second-order linear operator and ![]() is a given
source function. Appropriate boundary conditions are given at the boundaries
is a given
source function. Appropriate boundary conditions are given at the boundaries ![]() and
and
![]() .
.
For simplicity the physical space is split into two domains:
If ![]() , a function
, a function ![]() is described by its interpolant in terms of
is described by its interpolant in terms of ![]() :
:  .
The same is true for
.
The same is true for ![]() with respect to the variable
with respect to the variable ![]() . Such a set-up is obviously appropriate to
deal with problems where discontinuities occur at
. Such a set-up is obviously appropriate to
deal with problems where discontinuities occur at ![]() , that is
, that is ![]() and
and ![]() .
.
As for the standard tau method (see Section 2.5.2) and in each domain, the test functions are the basis
polynomials and one writes the associated residual equations. For instance, in the domain ![]() one gets:
one gets:
Two supplementary equations are enforced to ensure that the boundary conditions are fulfilled. Finally,
the operator ![]() being of second order, one needs to ensure that the solution and its first derivative are
continuous at the interface
being of second order, one needs to ensure that the solution and its first derivative are
continuous at the interface ![]() . This translates to a set of two additional equations involving both
domains.
. This translates to a set of two additional equations involving both
domains.
So, one considers
for a total of ![]() equations. The unknowns are the coefficients of
equations. The unknowns are the coefficients of ![]() in both domains (i.e. the
in both domains (i.e. the ![]() and the
and the ![]() ), that is
), that is ![]() unknowns. The system is well posed and admits a unique
solution.
unknowns. The system is well posed and admits a unique
solution.
As for the standard collocation method (see Section 2.5.3) and in each domain, the test functions are the
Lagrange cardinal polynomials. For instance, in the domain ![]() one gets:
one gets:
Two supplementary equations are enforced to ensure that the boundary conditions are fulfilled. Finally,
the operator ![]() being second order, one needs to ensure that the solution and its first derivative are
continuous at the interface
being second order, one needs to ensure that the solution and its first derivative are
continuous at the interface ![]() . This translates to a set of two additional equations involving the
coefficients in both domains.
. This translates to a set of two additional equations involving the
coefficients in both domains.
So, one considers
for a total of ![]() equations. The unknowns are the coefficients of
equations. The unknowns are the coefficients of ![]() in both domains (i.e. the
in both domains (i.e. the ![]() and the
and the ![]() ), that is
), that is ![]() unknowns. The system is well posed and admits a unique
solution.
unknowns. The system is well posed and admits a unique
solution.
The method described here proceeds in two steps. First, particular solutions are computed in each domain.
Then, appropriate linear combinations with the homogeneous solutions of the operator ![]() are performed
to ensure continuity and impose boundary conditions.
are performed
to ensure continuity and impose boundary conditions.
In order to compute particular solutions, one can rely on any of the methods described in Section 2.5.
The boundary conditions at the boundary of each domain can be chosen (almost) arbitrarily. For instance,
one can use in each domain a collocation method to solve ![]() , demanding that the particular solution
, demanding that the particular solution
![]() is zero at both ends of each interval.
is zero at both ends of each interval.
Then, in order to have a solution over the whole space, one needs to add homogeneous solutions to the
particular ones. In general, the operator ![]() is second order and admits two independent homogeneous
solutions
is second order and admits two independent homogeneous
solutions ![]() and
and ![]() in each domain. Let us note that, in some cases, additional regularity conditions can
reduce the number of available homogeneous solutions. The homogeneous solutions can either be computed
analytically if the operator
in each domain. Let us note that, in some cases, additional regularity conditions can
reduce the number of available homogeneous solutions. The homogeneous solutions can either be computed
analytically if the operator ![]() is simple enough or numerically, but one must then have a method for
solving
is simple enough or numerically, but one must then have a method for
solving ![]() .
.
In each domain, the physical solution is a combination of the particular solution and homogeneous ones of the type:
where
Contrary to previously presented methods, the variational one is only applicable with Legendre
polynomials. Indeed, the method requires that the measure be ![]() . It is also useful to extract the
second-order term of the operator
. It is also useful to extract the
second-order term of the operator ![]() and to rewrite it as
and to rewrite it as ![]() ,
, ![]() being first order
only.
being first order
only.
In each domain, one writes the residual equation explicitly:
The term involving the second derivative of ![]() is then integrated by parts:
is then integrated by parts:
The test functions are the same as the ones used for the collocation method, i.e. functions being zero at
all but one collocation point, in both domains (![]() ):
): ![]() . By making use of the Gauss
quadratures, the various parts of Equation (79
. By making use of the Gauss
quadratures, the various parts of Equation (79![]() ) can be expressed as (
) can be expressed as (![]() indicates the domain):
indicates the domain):
For points strictly inside each domain, the integrated term ![]() of Equation (79
of Equation (79![]() ) vanishes and one
gets equations of the form:
) vanishes and one
gets equations of the form:
As usual, two additional equations are provided by appropriate boundary conditions at both ends of the global domain. One also gets an additional condition by matching the solution across the boundary between the two domains.
The last equation of the system is the matching of the first derivative of the solution. However, instead
of writing it “explicitly”, this is done by making use of the integrated term in Equation (79![]() ) and this is
actually the crucial step of the whole method. Applying Equation (79
) and this is
actually the crucial step of the whole method. Applying Equation (79![]() ) to the last point
) to the last point ![]() of the first
domain, one gets:
of the first
domain, one gets:
Before finishing with the variational method, it may be worthwhile to explain why Legendre polynomials
are used. Suppose one wants to work with Chebyshev polynomials instead. The measure is
then ![]() . When one integrates the term containing
. When one integrates the term containing ![]() by parts, one gets
by parts, one gets
From a numerical point of view, the method based on an explicit matching using the homogeneous solutions is somewhat different from the two others. Indeed, one must solve several systems in a row and each one is of the same size as the number of points in one domain. This splitting of the different domains can also be useful for designing parallel codes. On the contrary, for both the variational and the tau method one must solve only one system, but its size is the same as the number of points in a whole space, which can be quite large for many domains settings. However, those two methods do not require one to compute the homogeneous solutions, computation that could be tricky depending on the operators involved and the number of dimensions.
The variational method may seem more difficult to implement and is only applicable with Legendre polynomials. However, on mathematical grounds, it is the only method that is demonstrated to be optimal. Moreover, some examples have been found in which the others methods are not optimal. It remains true that the variational method is very dependent on both the shape of the domains and the type of equation that needs to be solved.
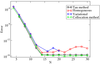
The choice of one method or another thus depends on the particular situation. As for the mono-domain
space, for simple test problems the results are very similar. Figure 16![]() shows the maximum
error between the analytic solution and the numeric one for the four different methods. All
errors decay exponentially and reach machine accuracy within roughly the same number of
points.
shows the maximum
error between the analytic solution and the numeric one for the four different methods. All
errors decay exponentially and reach machine accuracy within roughly the same number of
points.
| http://www.livingreviews.org/lrr-2009-1 | This work is licensed under a Creative Commons License. Problems/comments to |